Soft robotics
Soft robotics is relatively a new branch of robotics aimed on design, control, and fabrication of robots composed of compliant materials. Their properties are in great demand in the field of kinematically redundant robots.
Research objectives
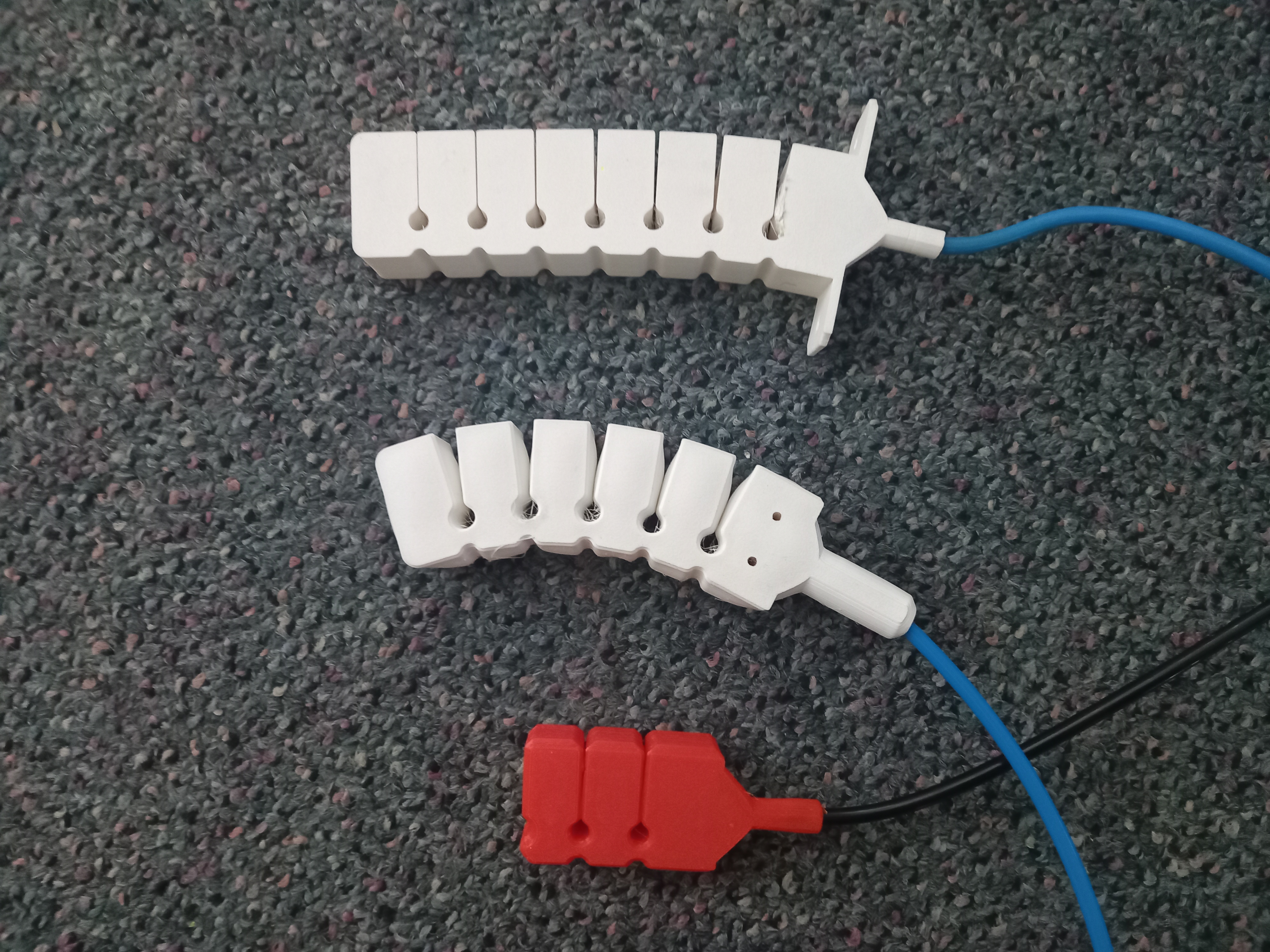
- Development of specific soft pneumatic actuators for kinematically redundant robots
- Soft grippers for fragile materials
Publications:
Design, modeling and control of kinematically redundant robots
Yangming Lee, Ivan Virgala, S. M. Hadi Sadati, Egidio Falotico
Frontiers in Robotics and AI, Frontiers Media SA, 2024
@Article{10.3389/frobt.2024.1399217,
author={Lee, Yangming and Virgala, Ivan and Sadati, S. M. Hadi and Falotico, Egidio},
journal = {Frontiers in Robotics and AI},
title = {Editorial: Design, modeling and control of kinematically redundant robots},
year = {2024},
pages = {22-40},
volume = {11},
issn = {2296-9144},
doi = {10.3389/frobt.2024.1399217},
url = {https://www.frontiersin.org/articles/10.3389/frobt.2024.1399217}
}