Snake robots
The snake robots are kinematically redundant robots, that can be used in the applications, where other kinds of robots are not effective. Our main focus is on terrestrial snake robots, especially with focus on in-pipe inspections.
Research objectives:
- Mechanical design of snake robots for in-pipe applications
- Control system design with adaptability to changing environment
- Development of the artificial locomotion patterns based on machine learning
Publications:
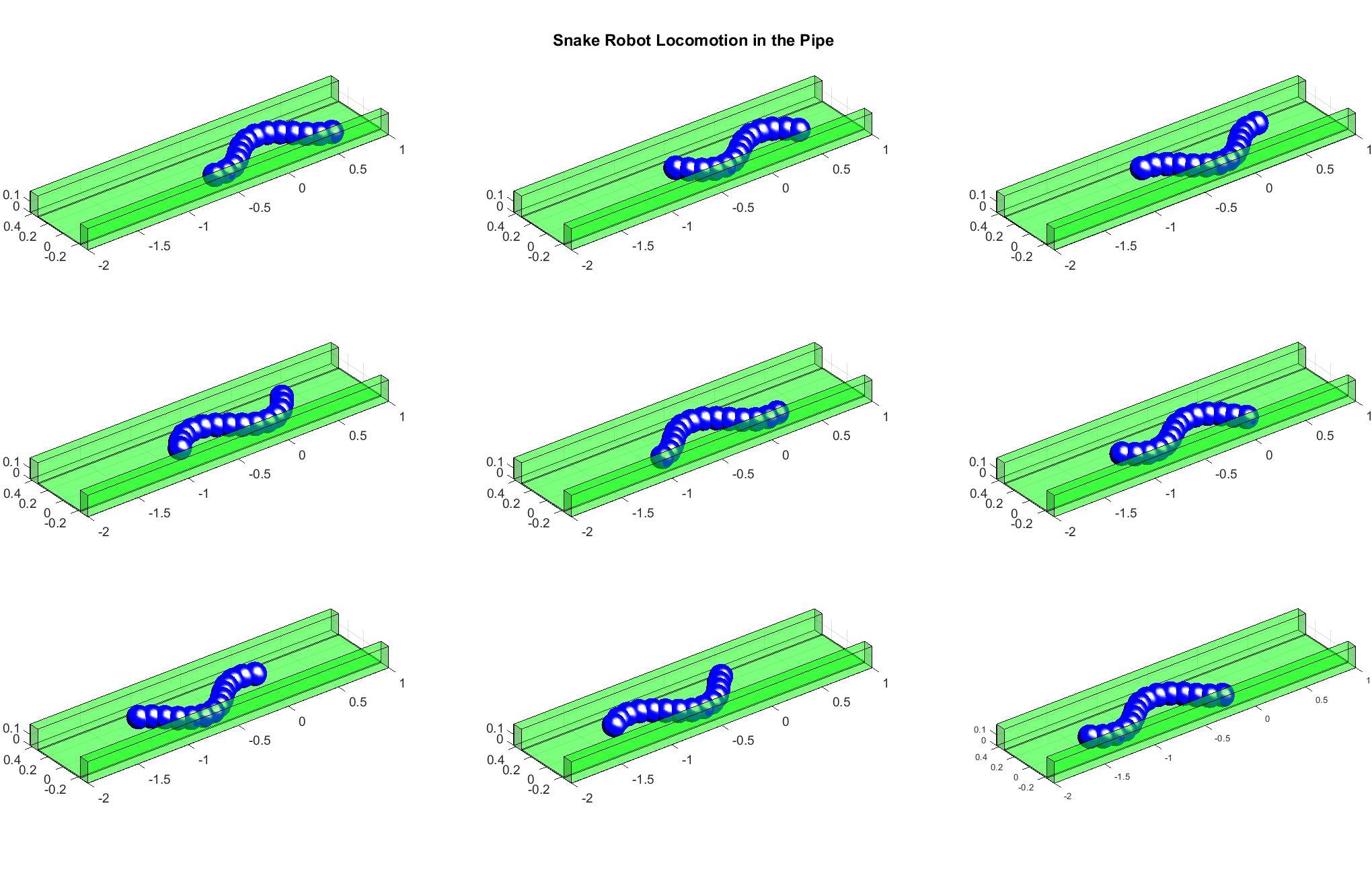
Mathematical framework for snake robot motion in a confined space
Ivan Virgala, Martin Varga, Peter Jan Sincak, Tomáš Merva, Roman Mykhailyshyn, Michal Kelemen
Applied Mathematical Modelling, Elsevier Ltd., 2024
@Article{VIRGALA202422,
author={Ivan Virgala and Martin Varga and Peter Jan Sincak and Tomáš Merva and Roman Mykhailyshyn and Michal Kelemen},
journal = {Applied Mathematical Modelling},
title = {Mathematical framework for snake robot motion in a confined space},
year = {2024},
pages = {22-40},
volume = {132},
publisher = {Elsevier Ltd.},
issn = {0307-904X},
doi = {https://doi.org/10.1016/j.apm.2024.04.020},
url = {https://www.sciencedirect.com/science/article/pii/S0307904X24001719},
keywords = {Control, Friction, Kinematic model, Dynamic model, Optimization, Snake robot}
}
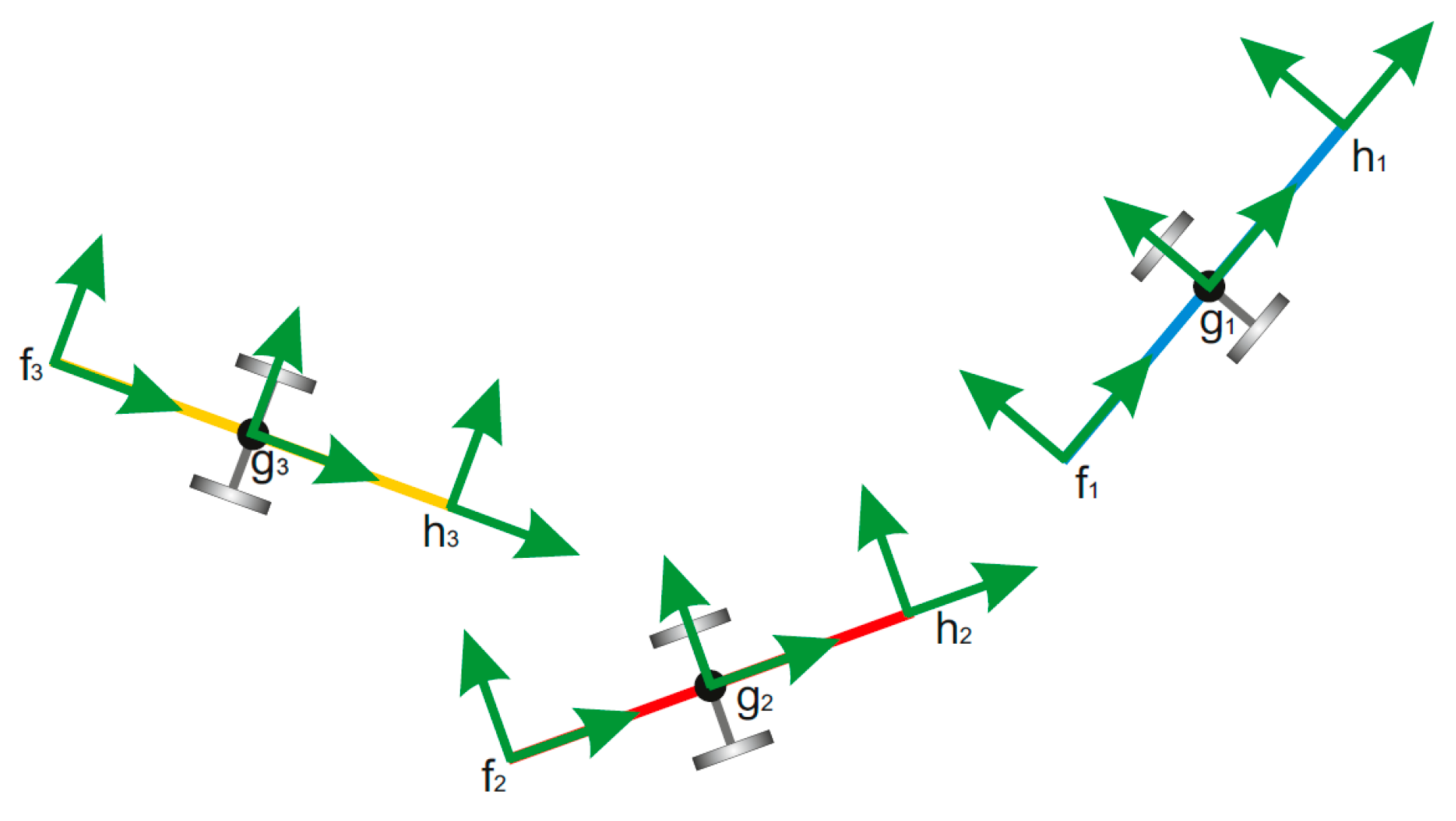
Mathematical Modeling of Robotic Locomotion Systems
Erik Prada, Ľubica Miková, Ivan Virgala, Michal Kelemen, Peter Ján Sinčák, Roman Mykhailyshyn
Symmetry, Multidisciplinary Digital Publishing Institute (MDPI), 2024
@Article{sym16030376,
author={Prada, Erik and Mikova, Lubica and Virgala, Ivan and Kelemen, Michal and Sincak, Peter Jan and Mykhailyshyn, Roman},
journal = {Symmetry},
title = {Mathematical Modeling of Robotic Locomotion Systems},
year = {2024},
pages = {},
volume = {16},
publisher = {MDPI},
issn = {2073-8994},
doi = {10.3390/sym16030376},
url = {},
keywords = {bio-inspired robotics; geometric mechanics; symmetric mechanical system; robotic locomotion
}
}
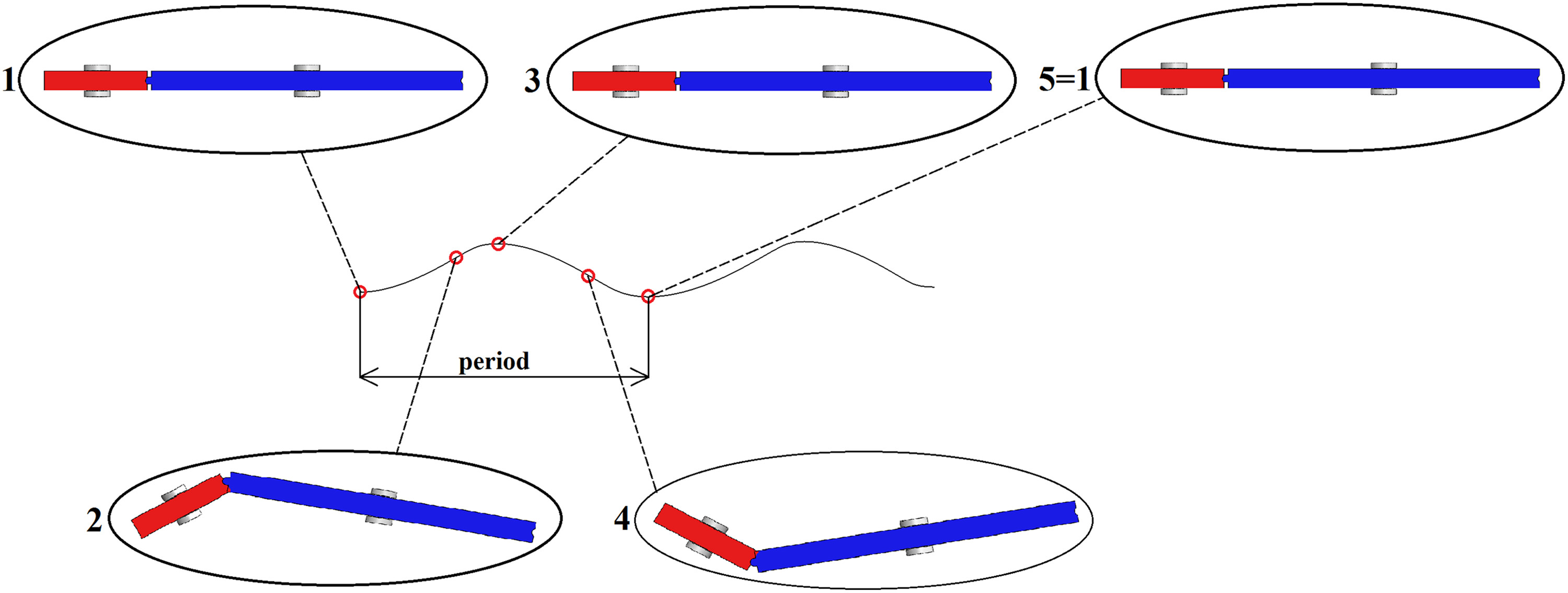
A snake robot for locomotion in a pipe using trapezium-like travelling wave
Ivan Virgala, Michal Kelemen, Erik Prada, Marek Sukop, Tomáš Kot, Zdenko Bobovský, Martin Varga, Peter Ferenčík
Mechanism and Machine Theory, Elsevier Ltd., 2021
@Article{VIRGALA2021104221,
author={Ivan Virgala and Michal Kelemen and Erik Prada and Marek Sukop and Tomáš Kot and Zdenko Bobovský and Martin Varga and Peter Ferenčík},
journal = {Mechanism and Machine Theory},
title = {A snake robot for locomotion in a pipe using trapezium-like travelling wave},
year = {2021},
number = {5},
pages = {104221},
volume = {158},
publisher = {Elsevier Ltd.},
keywords = {Control algorithm, Pipe, Redundant, Snake robot, Trapezium-like travelling wave}
}
Investigation of Snake Robot Locomotion Possibilities in a Pipe
Ivan Virgala, Michal Kelemen, Pavol Božek, Zdenko Bobovský, Martin Hagara, Erik Prada, Petr Oščádal, Martin Varga
Symmetry, Multidisciplinary Digital Publishing Institute (MDPI), 2020
@Article{2020,
author={Virgala, Ivan and Kelemen, Michal and Božek, Pavol and Bobovský, Zdenko and Hagara, Martin and Prada, Erik and Oščádal, Petr and Varga, Martin},
journal = {Symmetry},
title = {Investigation of Snake Robot Locomotion Possibilities in a Pipe},
year = {2020},
number = {6},
pages = {939},
volume = {12},
publisher = {MDPI AG}
}

An inspection of pipe by snake robot
František Trebuňa, Ivan Virgala, Miroslav Pástor, Tomáš Lipták, Ľubica Miková
International Journal of Advanced Robotic Systems, SAGE Publications Inc., 2016
@Article{Trebuna2016,
author={Trebuňa, František and Virgala, Ivan and Pástor, Miroslav and Lipták, Tomáš and Miková, Ľubica},
journal = {International Journal of Advanced Robotic Systems},
title = {An inspection of pipe by snake robot},
year = {2016},
number = {5},
pages = {1729881416663668},
volume = {13},
groups = {Sampling-based},
publisher = {SAGE Publications Sage UK: London, England},
}
Modeling and control of two-link snake
Tomáš Lipták, Ivan Virgala, Ľubica Miková, Alena Galajdová, Peter Tuleja, Lucia Koukolová, Jozef Varga, Marek Sukop
International Journal of Advanced Robotic Systems, SAGE Publications Inc., 2018
@Article{2020,
author={Tomáš Lipták, Ivan Virgala, Ľubica Miková, Alena Galajdová, Peter Tuleja, Lucia Koukolová, Jozef Varga, Marek Sukop},
journal = {International Journal of Advanced Robotic Systems},
title = {Modeling and control of two-link snake},
year = {2018},
number = {2},
pages = {1729881418760638},
volume = {15},
publisher = {SAGE Publications Inc.}
}
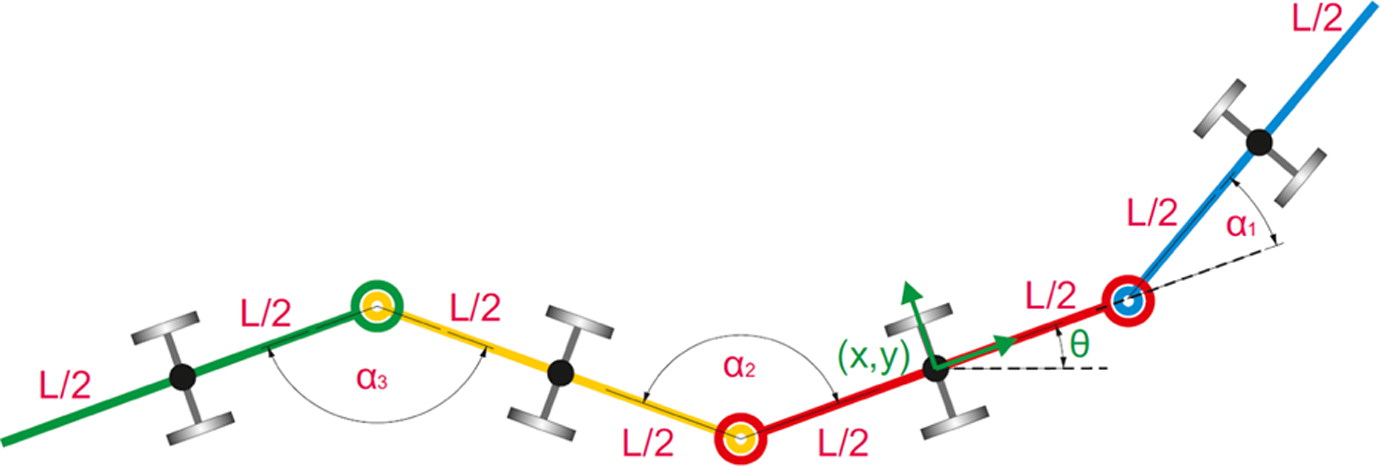
A geometric approach to modeling of four- and five-link planar snake-like robot
Tomáš Lipták, Ivan Virgala, Peter Frankovský, Patrik Šarga, Alexander Gmiterko, Lenka Baločková
International Journal of Advanced Robotic Systems, SAGE Publications Inc., 2016
@Article{2020,
author={Tomáš Lipták and Ivan Virgala and Peter Frankovský and Patrik Šarga and Alexander Gmiterko and Lenka Baločková},
journal = {International Journal of Advanced Robotic Systems},
title = {A geometric approach to modeling of four- and five-link planar snake-like robot},
year = {2016},
number = {5},
pages = {1729881416663714},
volume = {13},
publisher = {SAGE Publications Inc.}
}