Projects
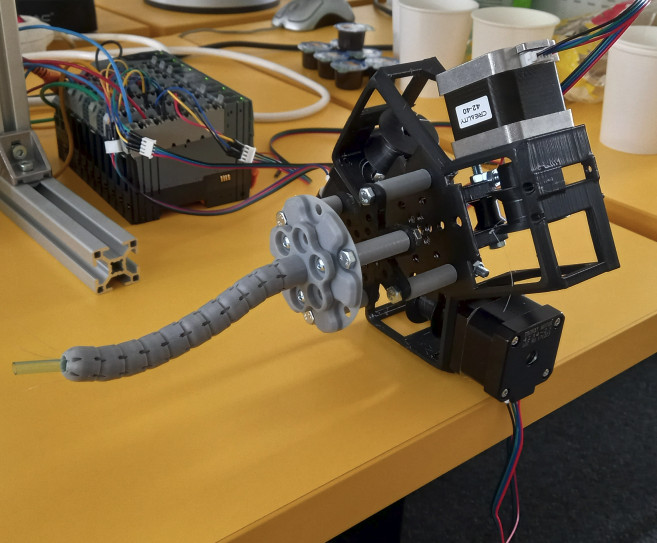
SoftGrip-to-ManApps
finished project (2024 - 2025)
The objective of the project is to develop an ultra-lightweight robotic end-effector, with a total mass in the range of several tens to hundreds of grams, designed for integration with both an aerial manipulation platform and a lightweight industrial robotic arm, enabling embodiment transfer to systems such as the Franka Emika FR3.
KEGA 008TUKE-4/2024 - Implementation of machine learning methods in the teaching process of industrial automation and robotics
ongoing project (2024 - 2026)
The project is focused on the implementation of knowledge from the research and project activities of the project members in the field of artificial intelligence, industrial automation, collaborative and industrial robotics into the teaching process. The focus of the project lies primarily in the deployment of artificial intelligence approaches, particularly machine learning, in applications in the field of industrial automation and robotics.

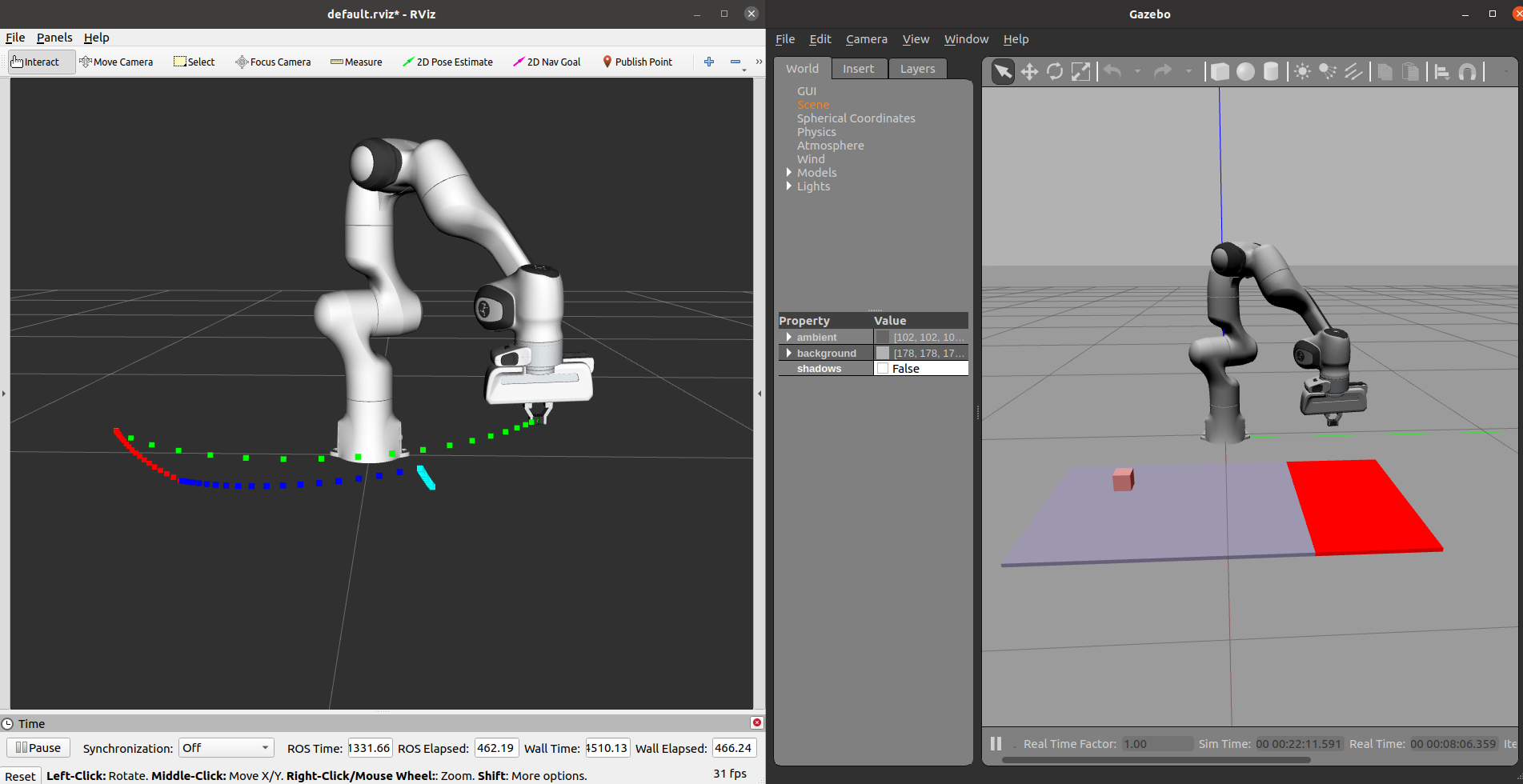
PneuTrunk v.2 - Collaborative redundant pneumatic manipulator
finished project (2023 - 2024)
The project aims to develop a new version of kinematically redundant pneumatic manipulator with collaborative properties. Robot is able to cooperate with human by vision system and is equipped with a soft gripper.
VEGA 1/0436/22 Research on modeling methods and control algorithms of kinematically redundant mechanisms
finished project (2022 - 2025)
The project aims to develop new methods and computing algorithms for kinematic and dynamic control of kinematically redundant robots such as industrial robots, snake robots, elephant trunk robots, soft robots, etc.

IVG-21-01 Monitoring bio-soft robot for minimally invasive surgery
finished project (2021 - 2022)
The project aims to develop a robotic system for monitoring purposes of minimally invasive surgeries. Robotic system is based on kinematically redundant collaborative robot Franka Emika Panda.
VEGA 1/0389/18 Research on kinematically redundant mechanisms
finished project (2018 - 2021)
The project aims to develop new methods and computing algorithms for kinematic and dynamic control od kinematically redundant robots like industrial robots, snake robots, elephant trunk robots, soft robots, etc.

BIDSF D4.2 Disassembly of large primary circuit components
finished project (2018 - 2021)
The aim of the project is developement of robotic workplace in nuclear power plant Jaslovské Bohunice (Slovakia) for the purposes of fragmentation of steam generators and radioactive waste.

E-Talent ARMatic – development of control algorithms for redundant robotic arm
finished project (2015)
The aim of the project is development of kinematicallz redundant pneumatic manipulator. One of the goals of the project is development of suitable control algorithm for end-effector positioning purposes.

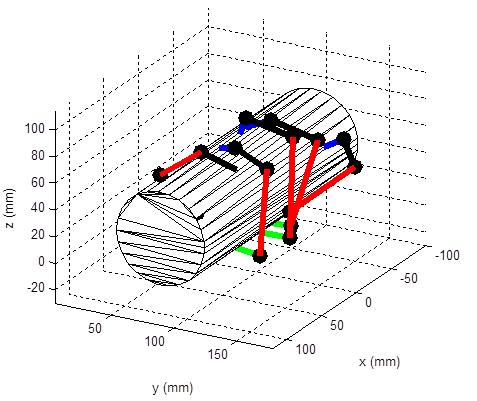
APVV 0091-11 Use of experimental and numerical modeling methods to increase competitiveness and innovation of mechanical and mechatronic systems
finished project (2012 - 2015)
The aim of the project is to develop snake robot for the pipeline inspection purposes.

TransBridge - innovative methods in the design of robotic mechanisms
finished project (2013)
The aim of the project is to develop a wheels-based snake robot for an experimental purposes with focus on differential geometry modelling, control, and experimental verifications.
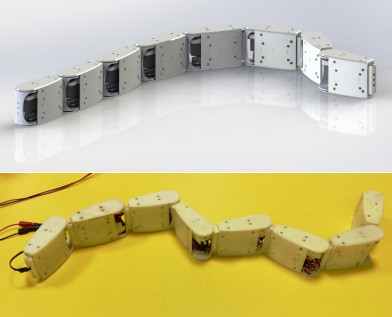
E-Talent LocoSnake - Snake robot locomotion in the pipeline
finished project (2012)
The aim of the project is to develop wheelless-based snake robot for experimental analyses. The robot uses concertina as well as rectilinear locomotion.