Robotic manipulators
To be able to achieve goals in complex, human-inhabited environments, a robot needs to autonomously decide and perform a sequence of actions. In our lab, we are working to solve this problem using methods from the integrated Task and Motion Planning (TAMP) field, with a main focus on the reactive execution of TAMP plans.
Research objectives
- Development of algorithms for reactive sequential robotic manipulations
Publications:
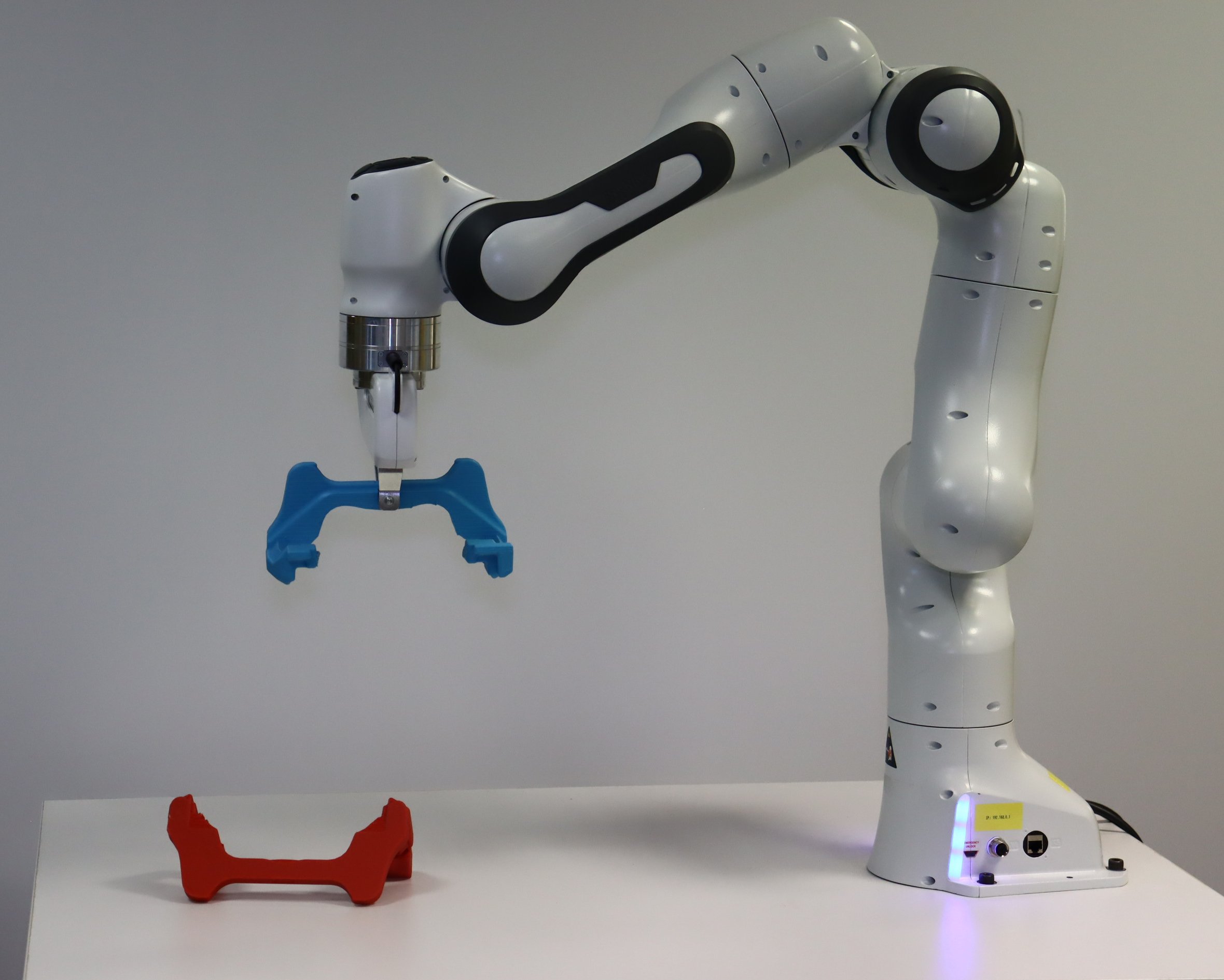
Simulation-Guided Path Optimization for Resolving Interlocked Hook-Shaped Components
Tomas Merva, Peter Jan Sincak, Robert Rakay, Martin Varga, Michal Kelemen, Ivan Virgala
Applied Sciences, Multidisciplinary Digital Publishing Institute (MDPI), 2025
@Article{app132413261,
author={Merva, Tomas and Sincak, Peter Jan and Rakay, Robert and Varga, Martin and Kelemen, Michal and Virgala, Ivan},
journal = {Applied Sciences},
title = {Simulation-Guided Path Optimization for Resolving Interlocked Hook-Shaped Components},
year = {2025},
number = {9},
pages = {},
volume = {15},
publisher = {MDPI},
DOI = {10.3390/app15094944},
ISSN = {2076-3417},
keywords = {}
}
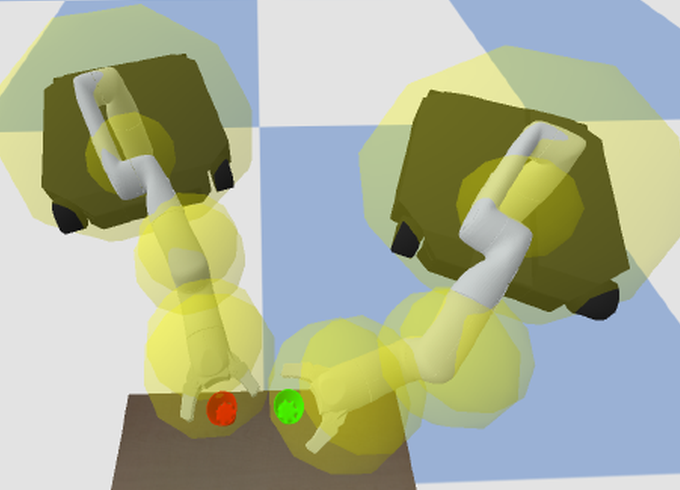
Globally-Guided Geometric Fabrics for Reactive Mobile Manipulation in Dynamic Environments
Tomas Merva, Saray Bakker, Max Spahn, Danning Zhao, Ivan Virgala, Javier Alonso-Mora
IEEE Robotics and Automation Letters, IEEE, 2025
@Article{app132413261,
author={Merva, Tomas and Bakker, Saray and Spahn, Max and Zhao, Danning and Virgala, Ivan and Alonso-Mora, Javier},
journal = {IEEE Robotics and Automation Letters},
title = {Globally-Guided Geometric Fabrics for Reactive Mobile Manipulation in Dynamic Environments},
year = {2025},
number = {6},
pages = {5553-5560},
volume = {10},
publisher = {IEEE},
DOI = {10.1109/LRA.2025.3562005},
ISSN = {},
keywords = {Fabrics;Planning;Collision avoidance;Manipulator dynamics;Robots;End effectors;Real-time systems;Radio frequency;Dynamics;Navigation;Mobile manipulation;constrained motion planning;geometric fabrics;collision avoidance}
}
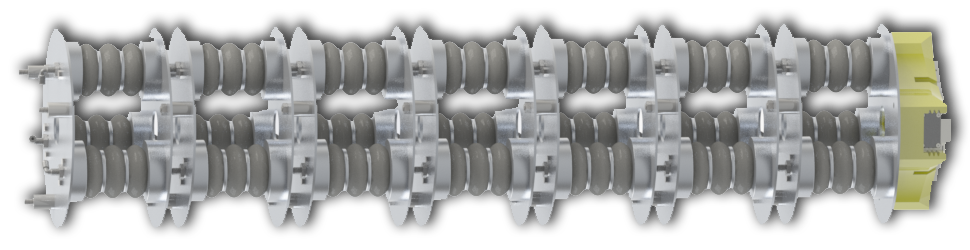
Pneumatic Bellows Actuated Parallel Platform Control with Adjustable Stiffness Using a Hybrid Feed-Forward and Variable Gain Integral Controller
Martin Varga, Ivan Virgala, Michal Kelemen, Ľubica Miková, Zdenko Bobovský, Peter Jan Sincak, Tomáš Merva
Applied Sciences, Multidisciplinary Digital Publishing Institute (MDPI), 2023
@Article{app132413261,
author={Varga, Martin and Virgala, Ivan and Kelemen, Michal and Miková, L’ubica and Bobovský, Zdenko and Sincak, Peter Jan and Merva, Tomáš},
journal = {Applied Sciences},
title = {Pneumatic Bellows Actuated Parallel Platform Control with Adjustable Stiffness Using a Hybrid Feed-Forward and Variable Gain Integral Controller},
year = {2023},
number = {24},
pages = {2229},
volume = {13},
publisher = {Multidisciplinary Digital Publishing Institute (MDPI)},
DOI = {10.3390/app132413261},
ISSN = {2076-3417},
keywords = {pneumatic bellows; parallel platform; feed-forward controller; variable-gain integral}
}
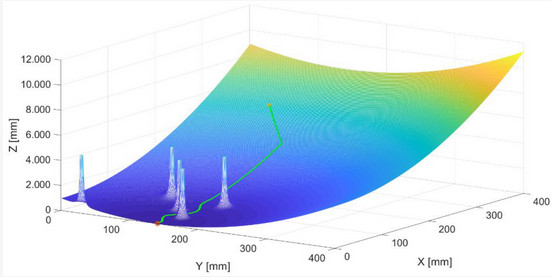
A Novel Approach for a Inverse Kinematics Solution of a Redundant Manipulator
Michal Kelemen, Ivan Virgala, Tomas Liptak, Lubica Mikova, Filip Filakovsky, Vladimir Bulej
Applied Sciences, Multidisciplinary Digital Publishing Institute (MDPI), 2018
@Article{Kelemen2018,
author={Michal Kelemen, Ivan Virgala, Tomas Liptak, Lubica Mikova, Filip Filakovsky, Vladimir Bulej},
journal = {Applied Sciences},
title = {A Novel Approach for a Inverse Kinematics Solution of a Redundant Manipulator},
year = {2018},
number = {11},
pages = {2229},
volume = {8},
publisher = {Multidisciplinary Digital Publishing Institute (MDPI)},
keywords = {computing time; inverse kinematics; joint limit avoidance; kinematic singularity; manipulator; obstacle avoidance; potential field}
}